|
 |
| 적용 분야에 따라 폐루프 스텝 모터 제어 시스템이 zxzx에 비해 우수한 성능을 발휘합니다. |
 |
 |
| |
일반적으로 서보 모터의 토크는 위치 에러에 비례합니다.
그러나 스텝 모터의 토크는 위치 에러 관계가 없습니다.
스텝 모터의 토크는 단지속도에 관계합니다. |
 |
 |
| |
모터 1회전당 62.8㎜를 이동하기 때문에 대부분의 모션이 모터 입장에서 보면 단 핏치 운동입니다.
Belt Pulley 모션의 경우 부하의 강성이 적기 때문에 모션 정지 시 부하의 흔들림이 모터 축에 직접 전달됩니다.
서보 모터의 경우 모터 정지 시 매우 작은 힘으로 목표 위치를 유지하고 있는 상황에서 부하의 흔들림이 모터 축에 직접
전달되지 때문에 진동이 심하게 발생합니다. 그러나 Ezi-SERVO는 저강성 부하(Belt Pulley)에서도 최적의 성능을 발휘합니다. |
 |
 |
| |
 탈조에 의한 위치 오차 없이 확실한 위치 결정이 가능합니다. 탈조에 의한 위치 오차 없이 확실한 위치 결정이 가능합니다.
정지 시는 안정된 유지력을 갖고 있고, 기계 진동 등의 외력에 의해 위치 오차가 생겨도 자동적으로 목표 위치로 복귀합니다.
Open-Loop 제어 스텝핑 모터의 경우 탈조를 고려하여 모터 토크의 약 50%정도 밖에 사용하지 못하지만 Ezi-SERVO는 100%
사용 가능합니다.
Open-Loop 스텝핑 모터는 부하의 변동에 관계없이 모든 동작 속도에서 정전류 구동을 하지만 Ezi-SERVO는 부하에 따라
전류를 제어하기 때문에 고속운전이 가능합니다.(최고속도 : 3000[rpm]) |
| |
| |
 |
| |
게인 조정이 필요하지 않습니다. (부하에 따라 게인을 자동 조정합니다.)
정지 후 미세 진동없이 안정된 목표 위치를 유지합니다.
독자적인 제어 알고리즘에 의해 빠른 위치 결정이 가능합니다.(고속, 단피치 운동에 적합)
고속, 단피치 운동인 경우, Settle 시간이 작기 떄문에 비전을 이용한 검사장비 등에 우수한 성능을 발휘합니다. |
 |
| |
Ezi-SERVO는 폐루프 제어 시스템입니다.모터에 장착된 고정도 엔코더에 의해 항상 현재 위치를 파악하고 있기
때문에 탈조가 발생하지 않는 서보 시스텝입니다. 엔코더 피드백에 의해 Ezi-SERVO는 항상 현재 위치를 파악하여 필요한 경우 위치 보정을 합니다. (25μsec)
|
 |
 |
| |
일반적인 서보 시스템에서 게인조정은 성능향상을 위해 필수적입니다. 게인 조정을 위해 많은 시간이 필요하고,
부하의 종류에 따라 문제가 발생됩니다.
그러나, Ezi-SERVO는 스텝핑 모터의 특성을 이용하여 게인조정이 필요치 않는 서보 시스템입니다.
특히 일반적인 서보 시스템에서 문제가 되는 저강 성의 부하 (예를 들어, Belt anp Pulley System)에 최적인 Ezi-SERVO입니다.
Ezi-SERVO는 저강성 부하(Belt and Pulley)에서도 최적의 성능을 발휘합니다. |
 |
 |
| |
Ezi-SERVO는 스텝핑 모터의 특성을 이용하기 때문에 일반적인 서보 시스템에서
발생하는 헌팅 문제가 없습니다. 따라서, 모터가 정지 후 완전 정지하기 때문에 미세 진돌이 발생하지 않습니다,
비젼 등을 이용한 고속 검사 장비 등에서 Ezi-SERVO는 정지 후 진돌이 발생하지 않기 떄문에 위력을 발휘합니다.
Ezi-SERVO는 정지 후 진동이 발생하지 않습니다. |
 |
 |
| |
Ezi-SERVO는 고정 엔코더로 최대 32,000펄스/회전이 가능한 고정도 서브 시스템입니다.
또한, 기존의 마이크로스텝 구동과 달리 고성능 DSP에 의한 벡터 제어 및 필터링 기법으로
저속에서도 리플이 없는 부드러운 회전이 가능합니다. |
 |
 |
| |
Ezi-SERVO는 스텝핑 모터의 장점인 지령 위치에 매우 큰 추종성을 이용하기 때문에 위치 결정 시간이 매우 짧습니다.
따라서, 단핏치 운동이 빈번한 경우, 위치 결정시간을 대폭 단축 할 수 있습니다. 일반적인 서보 시스템에서 지령위치와 응답위치
사이에는 지연이 발생하여 지령위치의 종료 후 응답위치에 도달하기 위해서는 시간이 필요하여 위치결정 시간이 증가합니다.
Ezi-SERVO는 스텝핑 모터의 장점을 이용하여 응답 지연이 없는 고속의 위치 결정이 가능합니다. |
 |
 |
| |
Ezi-SERVO는 저속영역에서 일반적인 서보 모터에 비해 큰 토크를 연속해서 사용 가능합니다
또한 Ezi-SERVO 는 탈조 없이 100% 부하에서도 연속운전이 가능하기 떄문에 기존의 스텝핑 모터와
같이 토크 마진을 생각할 필요가 없습니다.
회전 속도에 따라 전류의 최적 위상제어 기능의 탑재로 고속영역에서 고 토크의 운전이 가능합니다. |
 |
| |
|
|
 |
 |
 |
 |
 |
 |
Ezi-SERVO는 고속 영역에서도 탈조
없이 운전이 가능합니다. 엔코더 피드백
에 의해 현재 위치를 감시하여 100%
부하에 대해 고 토크를 발생하기 때문에
고속 영역에서도 탈조 없이 운전이 가능
합니다. |
Ezi-SERVO는 고속 영역에서도 탈조
없이 운전이 가능합니다. 엔코더 피드백
에 의해 현재 위치를 감시하여 100%
부하에 대해 고 토크를 발생하기 때문에
고속 영역에서도 탈조 없이 운전이 가능
합니다. |
Ezi-SERVO는 부하에 따라 모터에 흐르는
전류를 제어하기 때문에 발열이 작고,
효율의 개선이 가능합니다. |
|
|
 |
 |
|
Ezi-STEP 시리즈 제품 특징
Ezi-STEP은 Unit 제품입니다. 즉, 모터와 드라이브가 가장 적합하게 조합된 Unit 제품입니다. Unit 제품이기 때문에, 기존의 스텝핑 모터에서 실현 불가능한 여러가지 기능이 적용 가능합니다. 센서 없이 탈조 검출, Software Damping에 의한 전 속도구간에서 Smooth 구동, 극저속에서의 진동방지 등)
Ezi-STEP은 스텝핑 모터의 고속, 고정도 구동을 위해, 고성능 DSP를 채용하여 새로운 제어 기술을 적용한 제품입니다. 즉, 스텝모터 로터(Rotor)의 위치 추정에 의해, 지금까지 스텝 모터와 드라이브에서는 검출이 가능하지 않은 탈조 검출이 가능합니다. (300rpm 이상 시 유효)
또한, Software Damping 및 필터링(Filtering)기법에 의한 스텝 각의 여자 타이밍 제어(Exciting Angle Control)에 의해 기계적인 진동의 억제가 가능하여 고속동작이 가능합니다. 마이크로 스텝에 의해 기본 분해능 1.8。를 최대 1/250(0.0072。)까지 분할 가능합니다. 상위제어기와 인터페이스를 위해 풍부한 출력신호를 제공합니다. (탈조 검출 알람, 동작중[Run-ning] 신호 등) |
|
 |
| Ezi-STEP은 외부에 별도의 센서 장착 없이 모터의 탈조 검출이 가능합니다. 지금까지 불가능하였던 스텝핑 모터의 탈조 검출을 모터의 전류, 전압, 역기전력 정보를 이용하여, 고성능 DSP에 의해 로터의 위치를 추정함으로서 탈조 검출이 가능합니다. (300 rpm 이상 속도) 이 신호를 감지하는 것에 의해 보다 고속 영역에서의 운전이 가능합니다. 즉, 탈조 발생을 염려하여사용하지 못했던 고속 영역까지 운전이 가능합니다. |
 |
 |
| 고성능 DSP에 의해 기본 분해능인 1.8。를 최대 1/250(0.0072。)까지 분할 가능합니다. 기존의 드라이브와 달리, Ezi-STEP은 PWM 제어를 매 25μsec 마다 수행하기 때문에 보다 정밀한 전류제어가 가능함에 따라, 고정도 마이크로 스텝이 가능합니다. 또한 극저속 영역에서 입력 펄스의 Software Filtering 기법에 의해 부드러운 운전이 가능합니다. |
|
 |
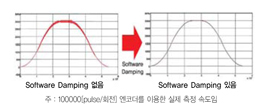
| Software Damping에 의한 진동 억제 및 고속운전 마이크로 스텝 구동시 스텝모터에 가하는 전류는 정확한 정현파 형태지만, 실제로 모터 마그네틱 플럭스의 비선형성, 고속 영역에서의 역기전력 증가에 의한 모터 전류의 감소, 모터 상간 전압의 감소 등 모두 스텝모터의 진동을 유발하는 원인입니다. Ezi-STEP은 이 비선형성을 고성능 DSP에 의해 감지하여, 이를 보상하기 위해 모터의 자극 위치에 대한 전류의 위상을 제어함으로써 진동억제가 가능합니다. 스텝핑 모터의 진동억제가 가능함에 따라, 고속 영역에서의 운전이 가능합니다. |
 |
 |
탈조 발생시 알람 신호 발생은 물론, 다양한 알람 종류에 의해 알람 신호가 발생합니다.
또한, 동작중(Run/Stop) 신호를 출력함으로써 상위 제어기와의 편리한 인터페이스를 제공합니다.
(알람 발생 종류는 LED에 의해 모니터링 가능합니다.) |
 |
드라이브 내부에서 모터의 속도에 따라 모터에 인가하는 전압을 상승시키기 때문에 고속에서
역기전력에 의해 실제 모터에 걸리는 전압의 감소에 따른 토크 저하를 방지함으로써, 고속운전이
가능합니다. 또한 Software Damping에 의해 진동을 대폭 줄일 수 있어 고속에서의 탈조를
방지합니다. |
 |
Ezi-STEP 시리즈 제품 특징 Ezi-STEP은 Unit 제품입니다.
즉, 모터와 드라이브가 가장 적합하게 조합된 Unit 제품입니다.
Unit 제품이기 때문에, 기존의 스텝핑 모터에서 실현 불가능한 여러가지 기능이 적용 가능합니다..
(센서 없이 탈조 검출, Software Damping에 의한 전 속도구간에서 Smooth 구동, 극저속에서의 진동방지 등) Ezi-STEP은 스텝핑 모터의 고속, 고정도 구동을 위해, 고성능 DSP를 채용하여 새로운 제어 기술을 적용한 제품입니다. 즉, 스텝모터 로터(Rotor)의 위치 추정에 의해, 지금까지 스텝 모터와 드라이브에서는 검출이 가능하지 않은 탈조 검출이 가능합니다. (300rpm 이상 시 유효).
또한, Software Damping 및 필터링(Filtering)기법에 의한 스텝 각의 여자 타이밍 제어(Exciting Angle Control)에 의해 기계적인 진동의 억제가 가능하여 고속동작이 가능합니다. .
마이크로 스텝에 의해 기본 분해능 1.8。를 최대 1/250(0.0072。)까지 분할 가능합니다. 상위제어기와 인터페이스를 위해 풍부한 출력신호를 제공합니다. (탈조 검출 알람, 동작중[Run-ning] 신호 등) |
| |
 |
Ezi-STEP은 외부에 별도의 센서 장착 없이 모터의 탈조 검출이 가능합니다. .
지금까지 불가능하였던 스텝핑 모터의 탈조 검출을 모터의 전류, 전압, 역기전력 정보를 이용하여, 고성능 DSP에 의해 로터의 위치를 추정함으로서 탈조 검출이 가능합니다. (300 rpm 이상 속도) 이 신호를 감지하는 것에 의해 보다 고속 영역에서의 운전이 가능합니다. .
즉, 탈조 발생을 염려하여 사용하지 못했던 고속 영역까지 운전이 가능합니다. |
 |
 |
| |
고성능 DSP에 의해 기본 분해능인 1.8。를 최대 1/250(0.0072。)까지 분할 가능합니다. .
기존의 드라이브와 달리, Ezi-STEP은 PWM 제어를 매 25μsec 마다 수행하기 때문에 보다 정밀한 전류제어가 가능함에 따라, 고정도 마이크로 스텝이 가능합니다. .
또한 극저속 영역에서 입력 펄스의 Software Filtering 기법에 의해 부드러운 운전이 가능합니다. |
 |
| |
Software Damping에 의한 진동 억제 및 고속운전 마이크로 스텝 구동시 스텝모터에 가하는 전류는 정확한 정현파 형태지만, 실제로 모터 마그네틱 플럭스의 비선형성, 고속 영역에서의 역기전력 증가에 의한 모터 전류의 감소, 모터 상간 전압의 감소 등 모두 스텝모터의 진동을 유발하는 원인입니다. .
Ezi-STEP은 이 비선형성을 고성능 DSP에 의해 감지하여, 이를 보상하기 위해 모터의 자극 위치에 대한 전류의 위상을 제어함으로써 진동억제가 가능합니다. 스텝핑 모터의 진동억제가 가능함에 따라, 고속 영역에서의 운전이 가능합니다. |
 |
 |
| |
탈조 발생시 알람 신호 발생은 물론, 다양한 알람 종류에 의해 알람 신호가 발생합니다. .
또한, 동작중(Run/Stop) 신호를 출력함으로써 상위 제어기와의 편리한 인터페이스를 제공합니다. .
(알람 발생 종류는 LED에 의해 모니터링 가능합니다.) |
 |
| |
드라이브 내부에서 모터의 속도에 따라 모터에 인가하는 전압을 상승시키기 때문에 고속에서 역기전력에 의해 실제 모터에 걸리는 전압의 감소에 따른 토크 저하를 방지함으로써, 고속운전이 가능합니다. .
또한 Software Damping에 의해 진동을 대폭 줄일 수 있어 고속에서의 탈조를 방지합니다. |
|
|
|
|
Ezi-STEP 시리즈 제품 특징
Ezi-STEP은 Unit 제품입니다. 즉, 모터와 드라이브가 가장 적합하게 조합된 Unit 제품입니다. .
Unit 제품이기 때문에, 기존의 스텝핑 모터에서 실현 불가능한 여러가지 기능이 적용 가능합니다. .
센서 없이 탈조 검출, Software Damping에 의한 전 속도구간에서 Smooth 구동, 극저속에서의 진동방지 등)
Ezi-STEP은 스텝핑 모터의 고속, 고정도 구동을 위해, 고성능 DSP를 채용하여 새로운 제어 기술을 적용한 제품입니다. .
즉, 스텝모터 로터(Rotor)의 위치 추정에 의해, 지금까지 스텝 모터와 드라이브에서는 검출이 가능하지 않은 탈조 검출이 가능합니다. (300rpm 이상 시 유효)
또한, Software Damping 및 필터링(Filtering)기법에 의한 스텝 각의 여자 타이밍 제어(Exciting Angle Control)에 의해 기계적인 진동의 억제가 가능하여 고속동작이 가능합니다. 마이크로 스텝에 의해 기본 분해능 1.8。를 최대 1/250(0.0072。)까지 분할 가능합니다. 상위제어기와 인터페이스를 위해 풍부한 출력신호를 제공합니다. (탈조 검출 알람, 동작중[Run-ning] 신호 등) |
|
|
Ezi-STEP은 외부에 별도의 센서 장착 없이 모터의 탈조 검출이 가능합니다..
지금까지 불가능하였던 스텝핑 모터의 탈조 검출을 모터의 전류, 전압, 역기전력 정보를 이용하여, 고성능 DSP에 의해 로터의 위치를 추정함으로서 탈조 검출이 가능합니다. (300 rpm 이상 속도) .
이 신호를 감지하는 것에 의해 보다 고속 영역에서의 운전이 가능합니다. .
즉, 탈조 발생을 염려하여사용하지 못했던 고속 영역까지 운전이 가능합니다. |
|
|
고성능 DSP에 의해 기본 분해능인 1.8。를 최대 1/250(0.0072。)까지 분할 가능합니다. .
기존의 드라이브와 달리, Ezi-STEP은 PWM 제어를 매 25μsec 마다 수행하기 때문에 보다 정밀한 전류제어가 가능함에 따라, 고정도 마이크로 스텝이 가능합니다. .
또한 극저속 영역에서 입력 펄스의 Software Filtering 기법에 의해 부드러운 운전이 가능합니다. |
|
|
Software Damping에 의한 진동 억제 및 고속운전 마이크로 스텝 구동시 스텝모터에 가하는 전류는 정확한 정현파 형태지만, 실제로 모터 마그네틱 플럭스의 비선형성, 고속 영역에서의 역기전력 증가에 의한 모터 전류의 감소, 모터 상간 전압의 감소 등 모두 스텝모터의 진동을 유발하는 원인입니다.
Ezi-STEP은 이 비선형성을 고성능 DSP에 의해 감지하여, 이를 보상하기 위해 모터의 자극 위치에 대한 전류의 위상을 제어함으로써 진동억제가 가능합니다.
스텝핑 모터의 진동억제가 가능함에 따라, 고속 영역에서의 운전이 가능합니다. |
|
|
탈조 발생시 알람 신호 발생은 물론, 다양한 알람 종류에 의해 알람 신호가 발생합니다.
또한, 동작중(Run/Stop) 신호를 출력함으로써 상위 제어기와의 편리한 인터페이스를 제공합니다.
(알람 발생 종류는 LED에 의해 모니터링 가능합니다.) |
|
드라이브 내부에서 모터의 속도에 따라 모터에 인가하는 전압을 상승시키기 때문에 고속에서
역기전력에 의해 실제 모터에 걸리는 전압의 감소에 따른 토크 저하를 방지함으로써, 고속운전이
가능합니다. 또한 Software Damping에 의해 진동을 대폭 줄일 수 있어 고속에서의 탈조를
방지합니다. |
|
.png)

.jpg)







